
The servos have different sizes, and the rotation speed, angle, torque and accuracy of them are also different.
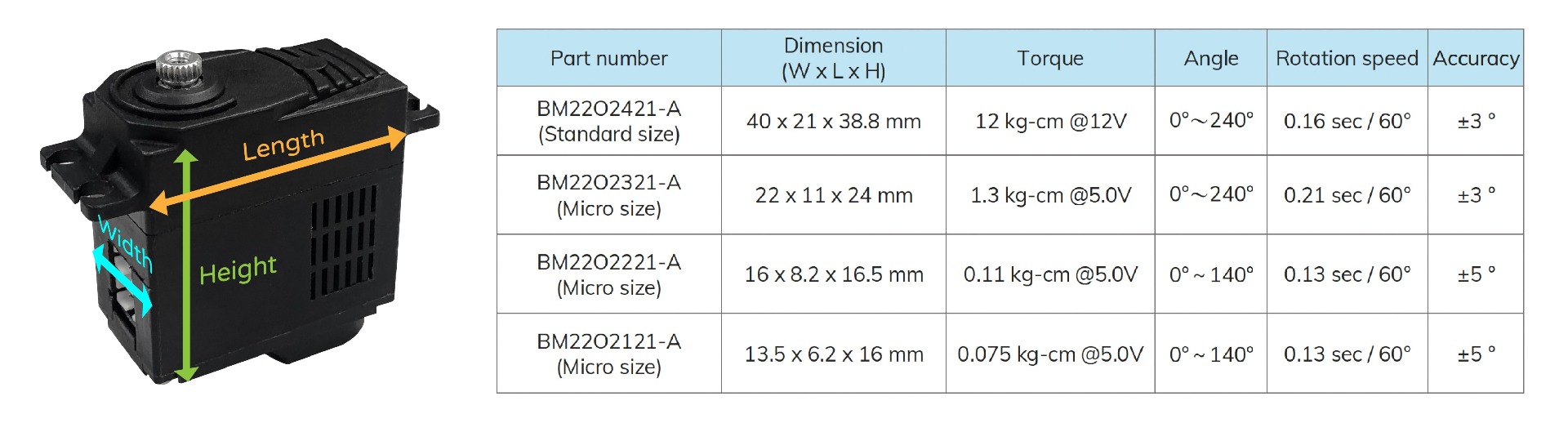
The servos have different sizes, and the rotation speed, angle, torque and accuracy of them are also different.
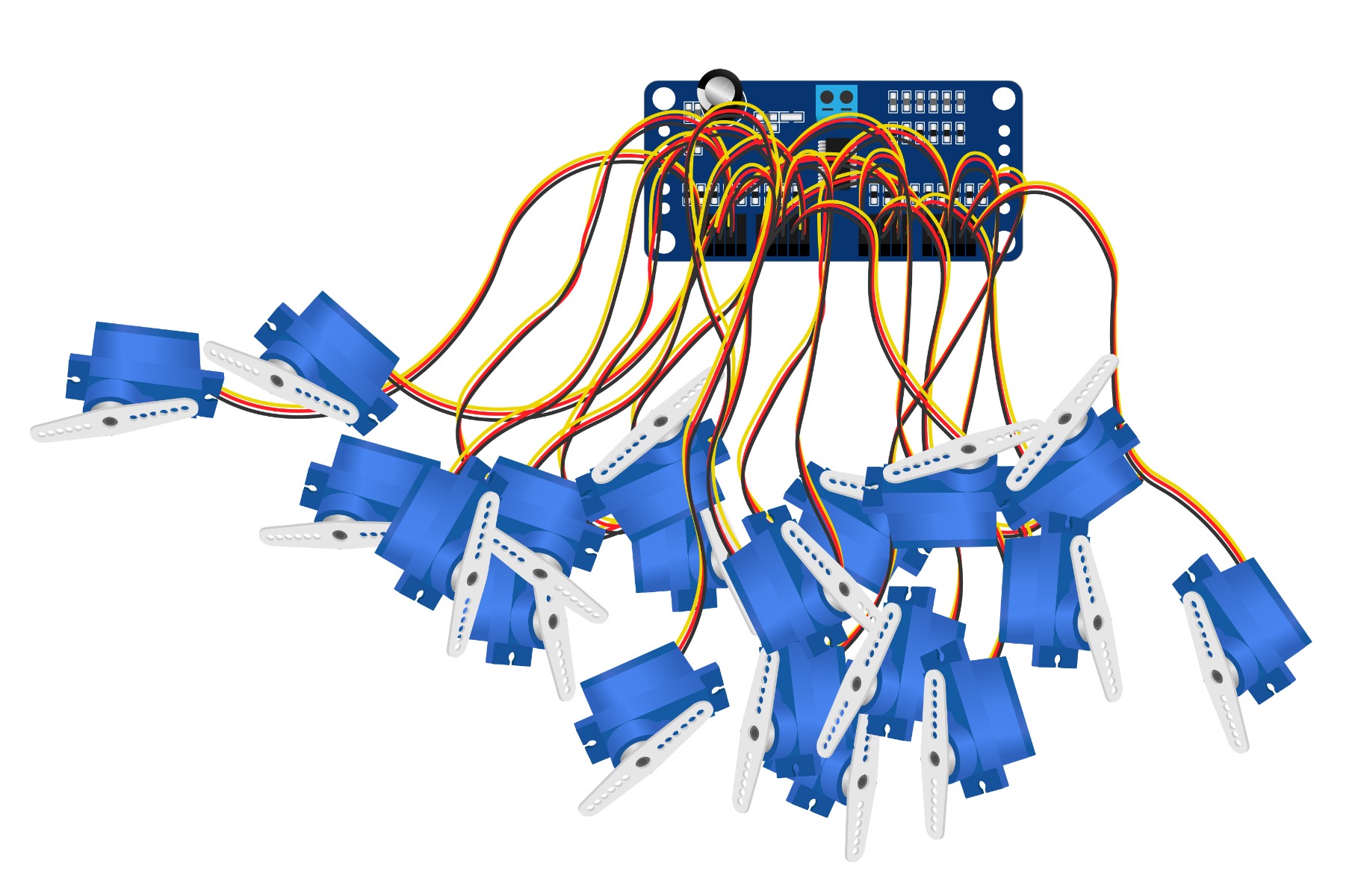
The PWM servo
Users can control the servo's angle through a fixed PWM cycle, but its performance of accuracy is not as good as UART servo. For robot control, one PWM output port only can be connected to one PWM servo.
To connect multiple servos, it necessary to use a control board to connect with servos, and the wires are in a mess.
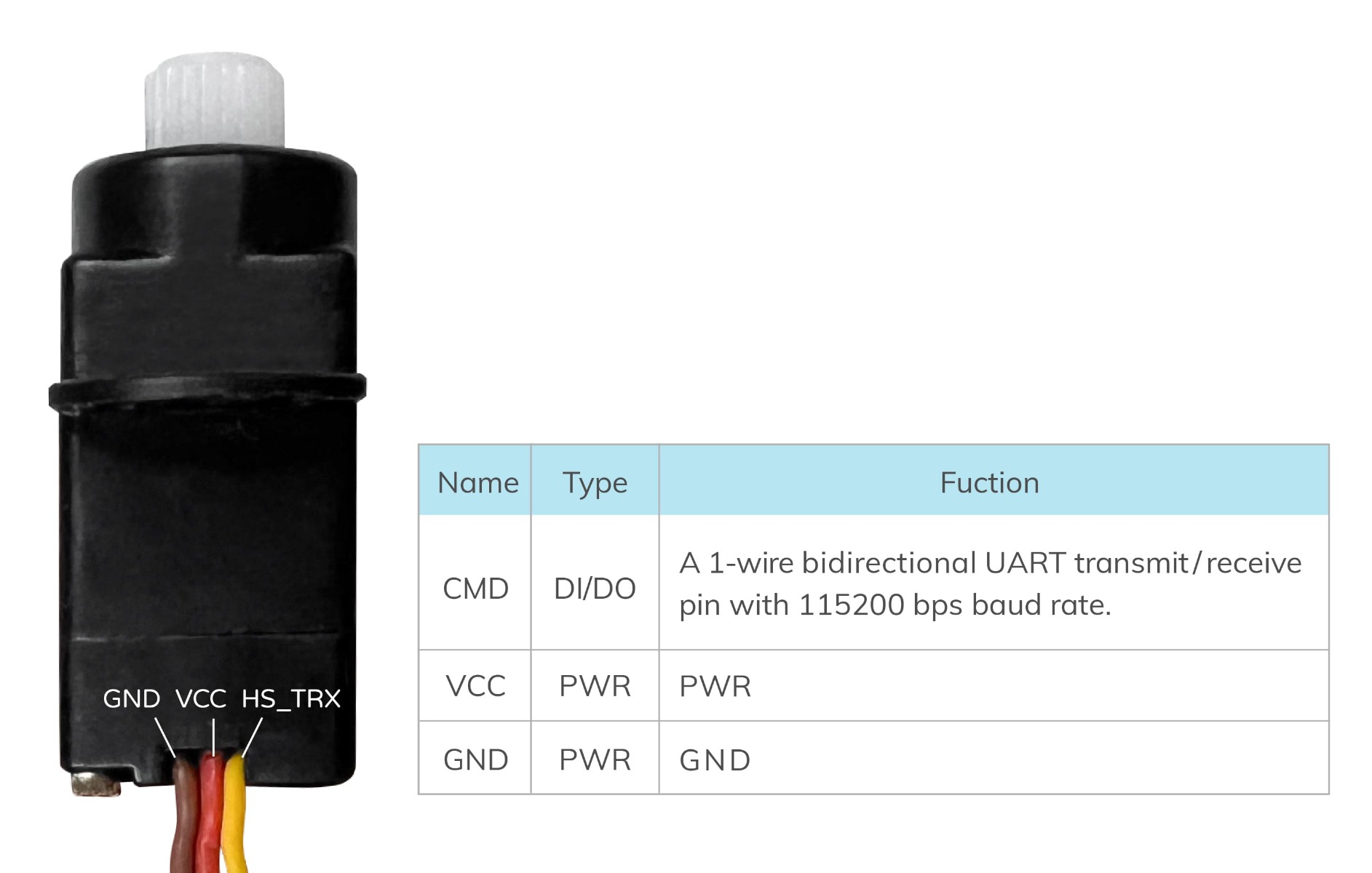
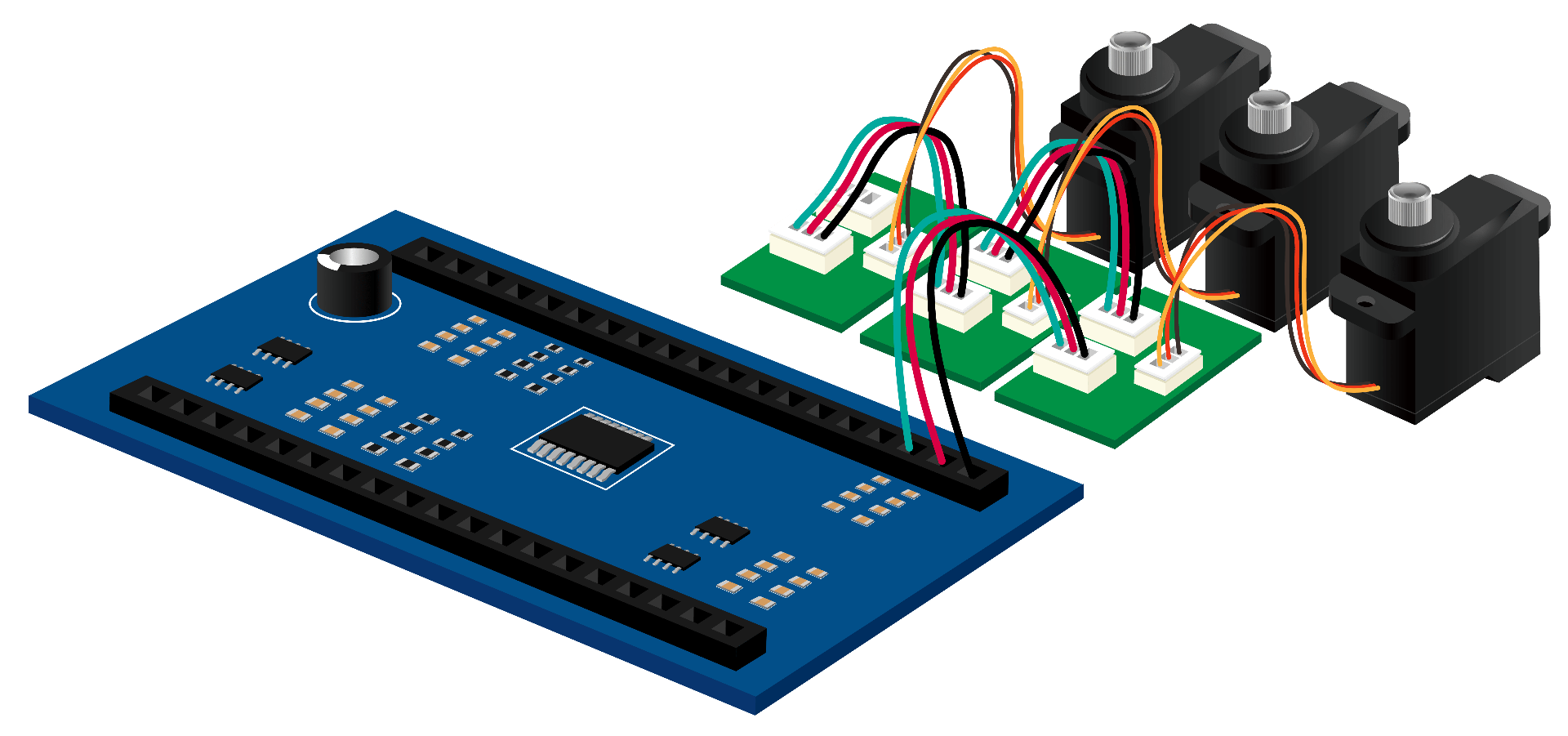
The UART servo
The servo's angle can be controlled by UART command, and it has high performance of accuracy. Besides, it also provides speed control. It communicates with control board through 1-wire bidirectional UART interface, and users can connect multiple servos in series.
The firmware and parameters can be updated by UART and IAP.
| HS Code (reference) | 8517.79.00.00-6 |
|---|